Pour retrouver les fils, les regrouper, remplacer les modules et les câbler, nous n’étions pas trop de trois, surtout qu’au début je craignais de casser quelque-chose.
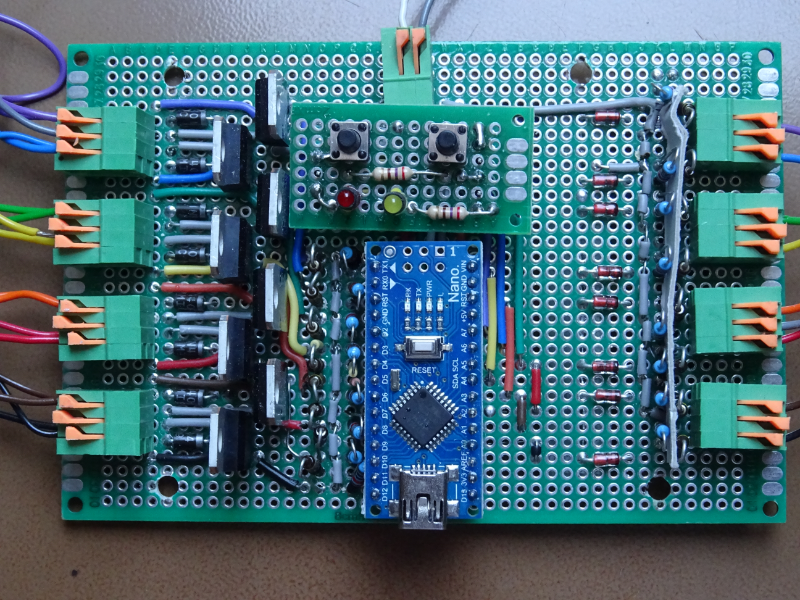
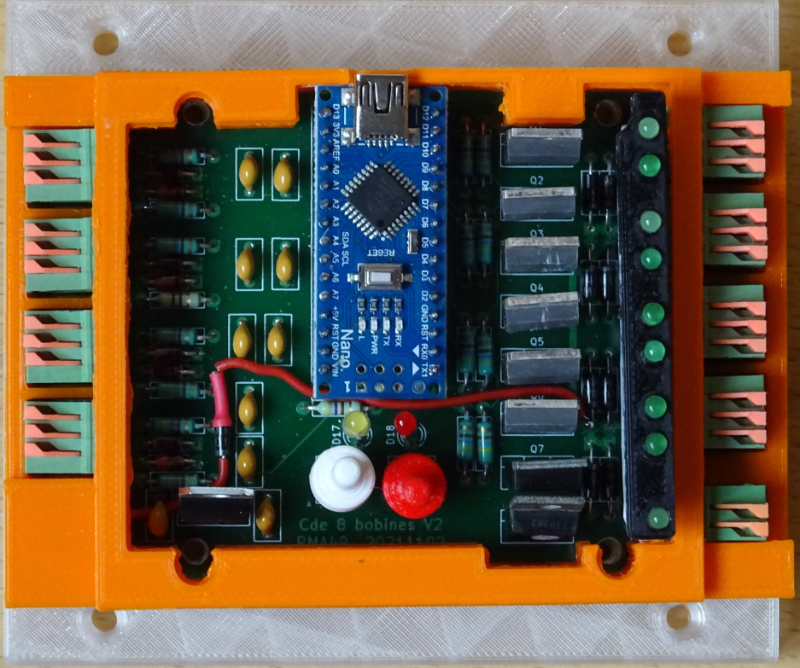
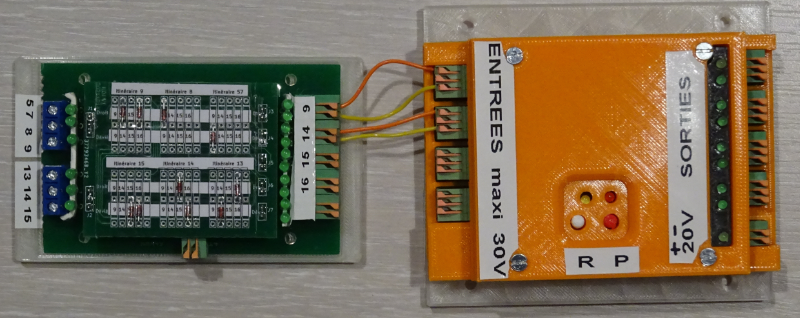
Nous avons monté 4 modules itinéraires et 4 modules de commande 8 bobines. Ceci permet de faire fonctionner 16 aiguillages sur les 17 du réseau. L’aiguillage A6b sera traité ultérieurement.
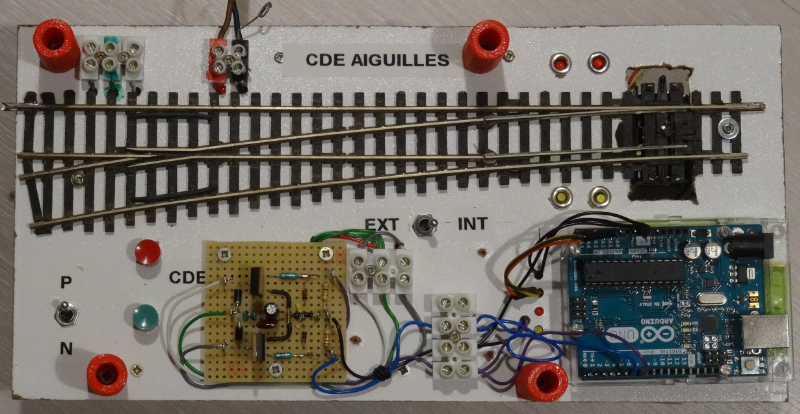
Le 18 février 2022 au soir, tous les itinéraires et les aiguillages sauf le A6b étaient câblés. Lors du test du dernier boitier, il s’est avéré que les itinéraires 10, 11 et 12 ne fonctionnaient pas. Nous avons découvert par la suite que la partie étroite du connecteur mâle entre les modules B et C était câblée à l’envers. Après réparation, les itinéraires fonctionnent parfaitement. Gilles a réajusté quelques contacteurs d’aiguilles et la plupart des LED des tableaux de commandes fonctionnent.
Lors du test complet on a remarqué malgré tout que si les moteurs d’aiguillages fonctionnent tous, il y en a 4 qui ne manœuvrent pas correctement leur aiguillage. Il s’agit de tous les moteurs qui ne se trouvent pas directement sous l’aiguillage car il n’y avait pas de place en hauteur du fait du passage d’une voie à l’étage au dessous. Ces moteurs sont déportés et ce sera le sujet du prochain article.